Jens Lundell
Assistant Professor (tenure track) in Robotics and Machine Learning @ University of Turku.

👋 Hello
I’m Jens Lundell an Assistant Professor in Robotics at the University of Turku, Finland.
My research focuses on enabling robots to grasp and manipulate objects in uncertain and cluttered environments. I combine deep learning, probabilistic reasoning, and tactile perception to build robust manipulation systems.
🕰️ Bio
I worked as a postdoctoral researcher from 2022-2025 with Danica Kragic in the Robotics, Perception and Learning Lab (RPL) at KTH in Stockholm, Sweden.
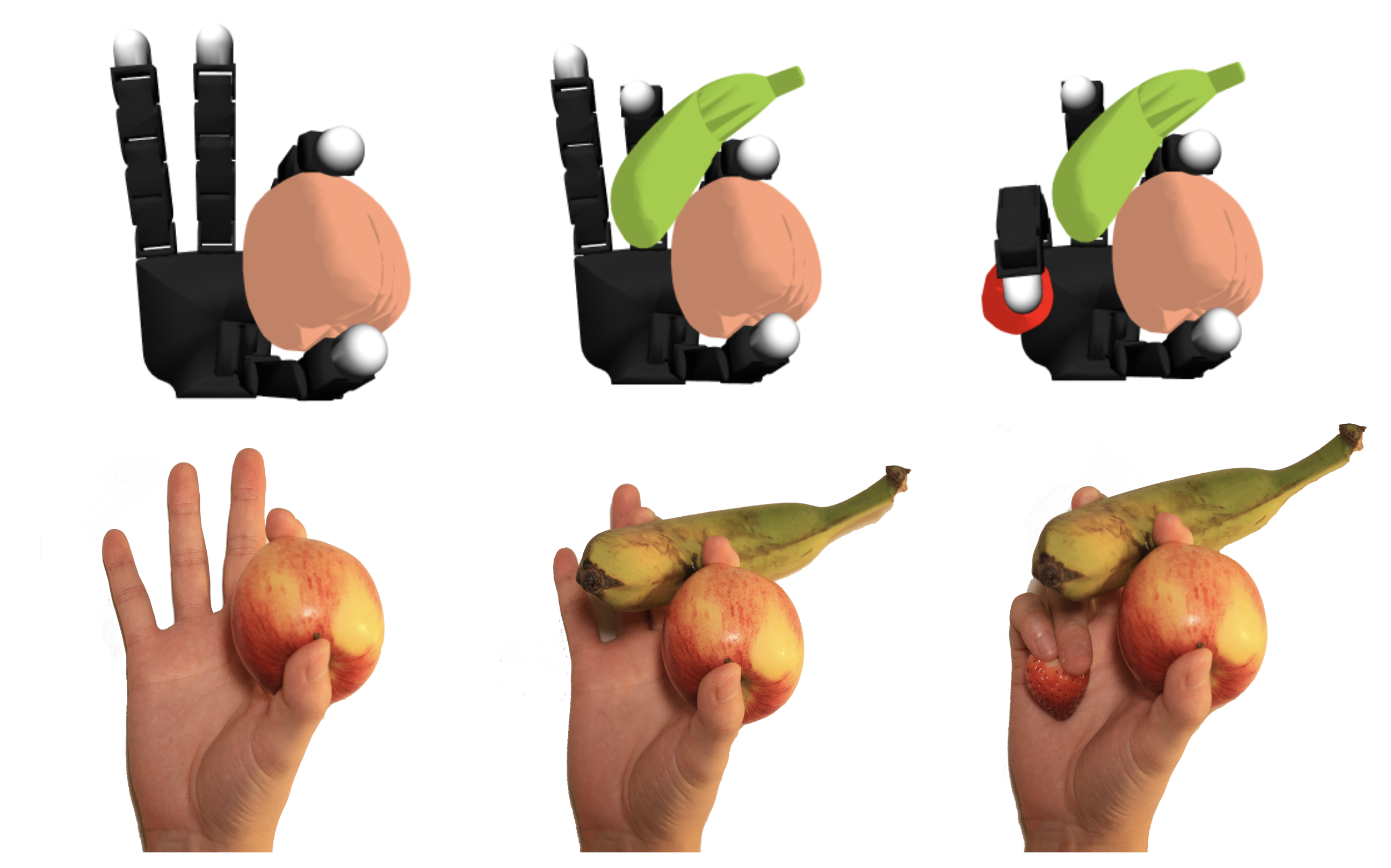
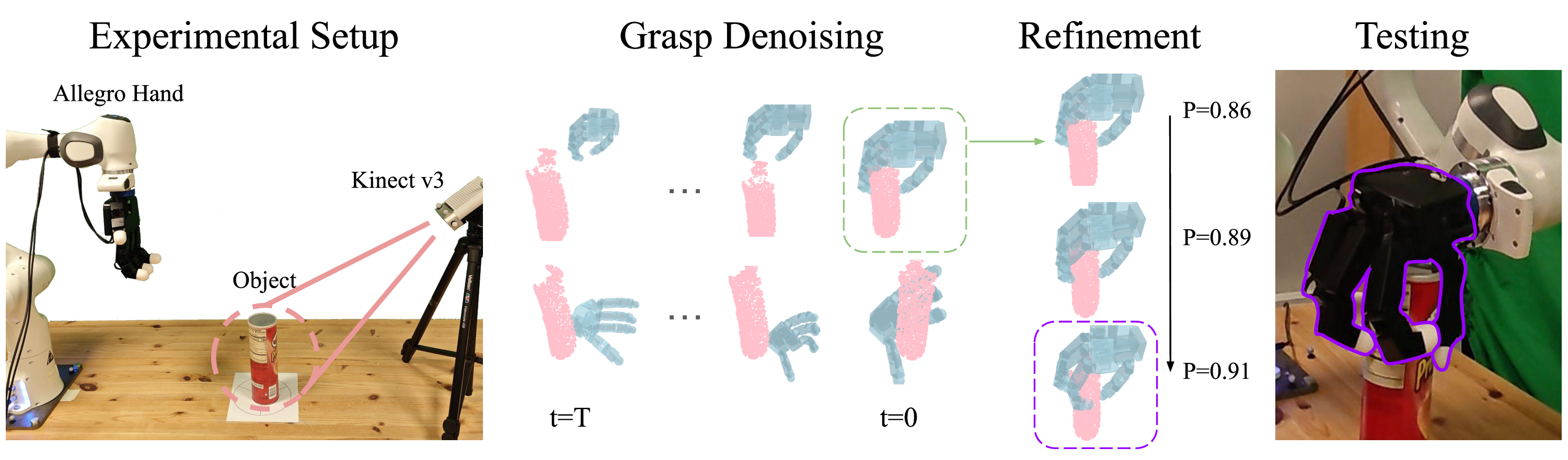
I did my Ph.D. in the Intelligent Robotics group at Aalto University (Finland) under the supervision of Prof. Ville Kyrki and Ph.D. Francesco Verdoja. My Ph.D. thesis addressed the problem of probabilistic 6-degree-of-freedom multi-finger grasping of objects in clutter. My solution to those problems was to explicitly shape-complete each object in the scene using deep learning, and plan grasps on those reconstructions. I also focused on using physics simulators to gather synthetic data for training deep networks.
I hold a Master’s degree in Space Science and Technology and a Bachelor’s degree in Automation and Systems Technology, both from Aalto University.
🔬 Research Interests
- Probabilistic grasp synthesis in cluttered scenes,
- Generative models for robotic manipulation,
- Cloth and deformable object state estimation,
- Visuo-haptic shape completion,
- Planning under uncertainty.
🎯 Opportunities
I am always open to collaborating with PhD students or supervising Master’s thesis projects in areas such as:
- 6-DoF grasp generation,
- Manipulation of cluttered or deformable objects,
- Visuo-haptic perception.
If you are interested, please contact me with:
- A short background,
- CV and transcript,
- Your research interests,
- Links to code or papers (if available).
📢 News
| Feb 09, 2026 | I will serve as an Associate Editor for ICRA 2026. |
|---|---|
| Sep 01, 2025 | I started as an Assistant Professor (tenure track) in Robotics and Machine Learning at University of Turku. |